Torsion Spring Antagonistic Setup
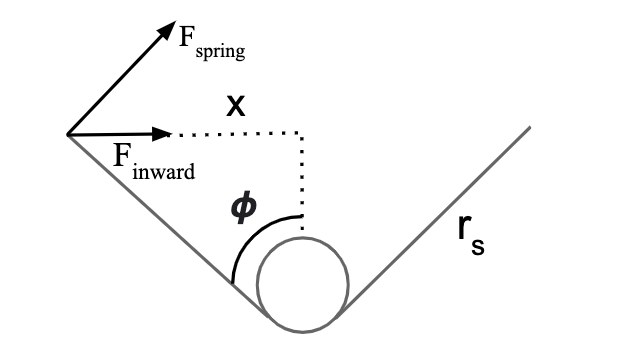
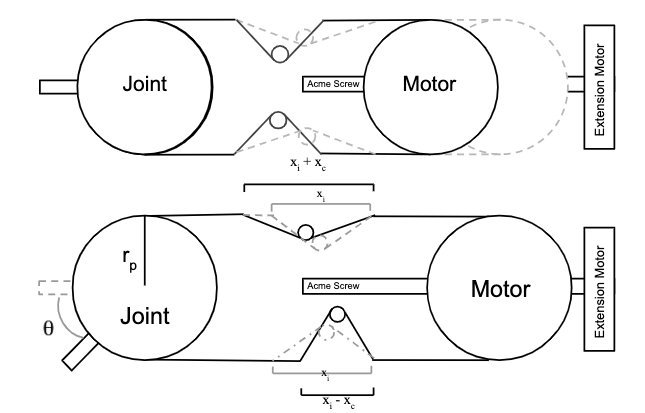
Implementing torsion springs in a belt transmission and changing the joint-motor distance results in variable joint stiffness, which can be controlled by the pretension.
This paper was accepted to the 6th International Conference on Automation, Control and Robotics Engineering (CACRE 2021) which will be held in July 2021.
We propose a mechanically simple and cheap design for a series elastic actuator with controllable stiffness. Such characteristics are necessary for animals for running, jumping, throwing, and manipulation, yet in robots, variable stiffness actuators are either complicated or mimicked at low bandwidth through feedback controllers. A robust and simple design is needed to build reliable and cheap robots with animal capabilities. The key insight of our design is attaching torsional springs to timing belts to create a variable stiffness linear spring. In an antagonistic pair, varying the distance between motor and joint then varies the actuator stiffness. We build a prototype of our proposed actuator, show the theoretical behavior matches the experimental characterization, and demonstrate an application to robotic one-legged hopping.
Implementing torsion springs in a belt transmission and changing the joint-motor distance results in variable joint stiffness, which can be controlled by the pretension.
Humans utilize variable stiffness in their legs to enable a multitude of benefits. Fixed passive compliance is not desirable in legged robots, as it limits the maximum operation speed of robots and the payload they can carry, as any load that would cause a deflection too great by the elastic components can result in robot failure. We designed a platform to test the implementation of our VSA design in motions such as hopping, and oscillation-less dropping, in which the energy from dropping is completely stored in the springs.
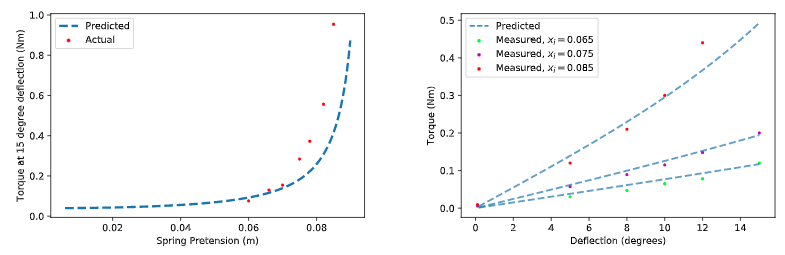
Our characterization expriments demonstrate that the actuator behaves similar to the prediced models. We carried out two tests, the first in which we fix the deflection and measure the torque at different deflections. In the second, we fix the stiffness and measure the torque-deflection relationship within the defined operating stiffness.
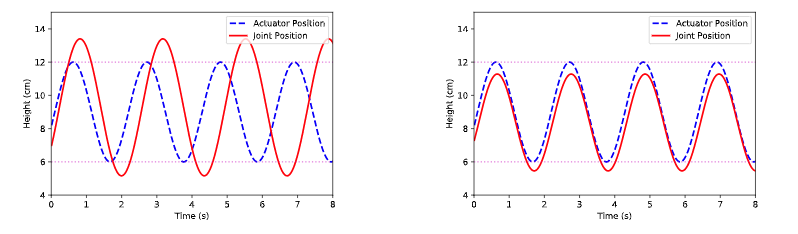
Hopping is very similar to running in the sense that they are both periodic motions that involve applying a force to the ground and moving the center of mass of the robot. Similar to humans, our leg requires different stiffness for higher or lower frequency hopping.
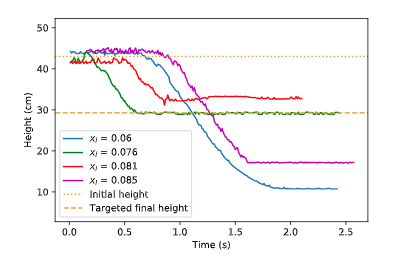
Our expriments show that from a fixed jump height, users can select a desired final height and initial leg angle for which the stiffness can be adjusted for an oscillation-less drop, in which the energy from the drop is completely absorbed in the torsion springs. Our predicted models perfromed with an only 1.885% error from the experimental.
Preliminary work on the design of this actuator was presented in the 2020 Robotics-Insipired Biology Workshop at the IEEE Conference on Robotics and Systems (IROS)
@misc{shah2021simpler,
title={SiMPLeR: A Series-Elastic Manipulator with Passive Variable Stiffness for Legged Robots},
author={Sajiv Shah and Brad Saund},
year={2021},
eprint={2107.02892},
archivePrefix={arXiv},
primaryClass={cs.RO}
}